Kverneland bouwt verbeterd prototype ziekzoeker voor pootgoedteelt

In 2025 volgt dan een praktijktest op kleine schaal, waarna in 2026 verdere opschaling staat gepland, zei Jan Kamp van WUR Open Teelten tijdens de Pootaardappeldag van Delphy. In deze praktijktest wordt samengewerkt met de handelshuizen HZPC, Agrico, Meijer Potato en de NAK.
Algoritme
Het algoritme is al een heel eind, maar verdere vergroting van de dataset is nodig. Zo herkent het nog niet alle rassen even goed, bleek vorig jaar op de velden van de NAK. „Daar moeten we dus extra energie in steken.” Daar komt bij dat de verschillen tussen de jaren waarin met de ziekzoeker is getest groot zijn. „Het weer is mede bepalend voor de resultaten; denk aan zon en regen. Maar ook de ontwikkeling van de plant verschilt per jaar en zorgt er voor dat er veel foto’s nodig zijn.”
De resultaten van 2023 geven volgens Kamp een positief beeld. Er zijn nog wel enkele uitdagingen. Zo laten de cijfers in het NAK-veld zien dat het algoritme van de ziekzoeker nog beter moet. Daarnaast is er de hoop dat de robot ook al in een zeer vroeg stadium zieke planten kan herkennen. „We zijn hiervoor de dataset aan het voeden, zodat de robot de ziekte eerder in beeld krijgt. Daar liggen wel kansen.” Derde vraag is hoe goed de ziekzoeker werkt in rassen die symptomen niet of heel kort tonen.
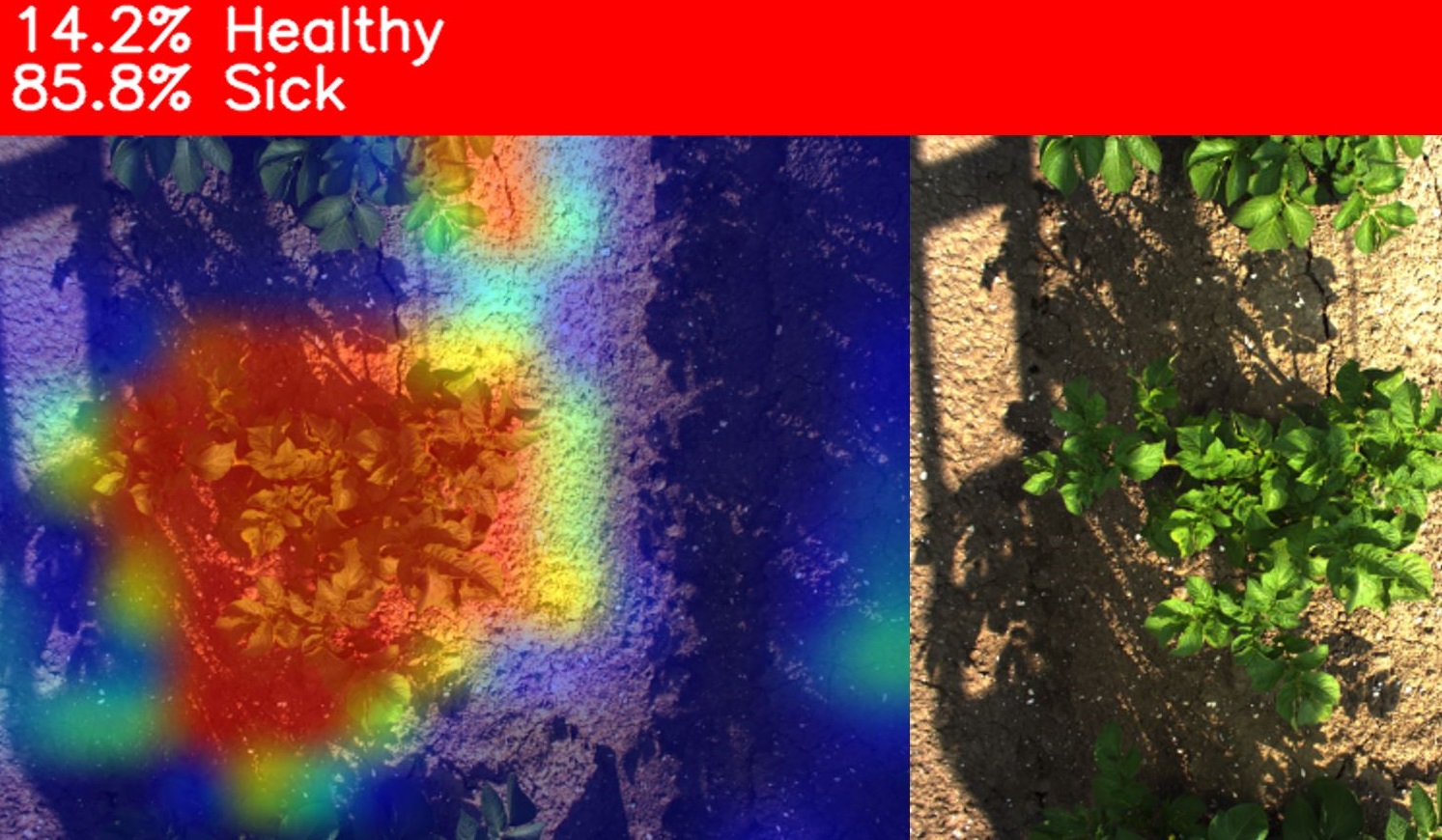
Gezonde plant gezien als ziek
Ook op het vlak van de kunstmatige intelligentie liggen er nog uitdagingen. Tijdens de praktijktesten in het veld vorig jaar bleek onder meer dat een aardappelplant die niet midden op de rug stond werd gezien als gezond. Ook kale grond werd gemarkeerd als gezond. „Die gekke dingen hebben we getackeld, maar blijf dus altijd alert met kunstmatige intelligentie op onverwachte effecten.”
De tekst gaat verder na de foto
Kamp is zeer tevreden over de resultaten tot dusver. „Deze zijn een goede basis voor een verdere vertaling naar een commercieel product.” Toch had hij gehoopt al grotere stappen te hebben gezet. „Het product is er nog niet. Ik had gehoopt dat we al verder waren.”
Uiteindelijke doel is een robot die op z’n minst net zo goed is als de keurmeester. „We denken op dit moment met de ziekzoekrobot een vergelijkbare kwaliteit te kunnen leveren als we tenminste 95 procent van de zieke planten kunnen detecteren. „De robot komt daar al zeker bij in de buurt”, aldus Kamp.
Drones en satellieten
Tijdens de pootaardappeldag werd ook gevraagd naar de mogelijkheden om drones of satellieten in te zetten voor de selectie. Kamp denkt dat satellieten geen optie zijn. „De beelden hiervan zijn veel te grof om planten goed te beoordelen. De beelden moeten echt van dichterbij zijn om een plant te kunnen herkennen als ziek of gezond.” Drones zijn volgens Kamp nog iets voor de toekomst. „De ontwikkeling van de camera’s voor drones zet wel door. Ik denk dat het er op termijn wel komt, maar dat zal nog wel vijf tot tien jaar duren.”
Voordeel van een drone ten opzichte van een selectiekar is dat deze niet door het gewas hoeft te rijden. „Dat leidt tot minder versmering. Dat maakt een drone wel ideaal voor de toekomst.”
Tulpenteelt
Het onderzoek naar selectie met een robot is niet van vandaag of gisteren. Al sinds 2015 wordt hier onderzoek naar gedaan, en Kamp is al die jaren betrokken bij de projecten. In de jaren daarvoor lag de focus op ziekzoeken in de tulpenteelt. Dit bolleninitiatief bracht Kamp in 2010 op het idee om dit te vertalen naar de pootaardappelteelt. In 2015 werd een PPS (publiek private samenwerking) opgestart in het kader van de Topsector Agri&Food opgezet en kwamen er middelen beschikbaar. Hier waren LTO / BO Akkerbouw, NAK, Agrico, HZPC en ook Kverneland bij betrokken.
